FPS engine
About the Project
An 8-week custom C++ engine project built by a team of 6 at BUas, on top of Bee, the university’s in-house learning engine which provides a basic set of engine features for students to build upon. The engine, originally developed by team Wasp, was later merged with a graphics team called Firefly and continued as Firewasp. At the end of the block the engine was selected as the custom tech for the next group project.
Team: 6 programmers (Wasp)
Duration: 8 weeks
Engine: Firewasp (custom C++)
Role: AI programmer
My contributions were integrating the Recast navigation library into the engine, building an agent behaviour API on top of it, and creating two demos to showcase the system: a COD Zombies-style demo and a PayDay 2 stealth demo.
At the end of the block the engine was selected as the custom tech for the following group project, one of two engines chosen from across the year.
Recast Navigation
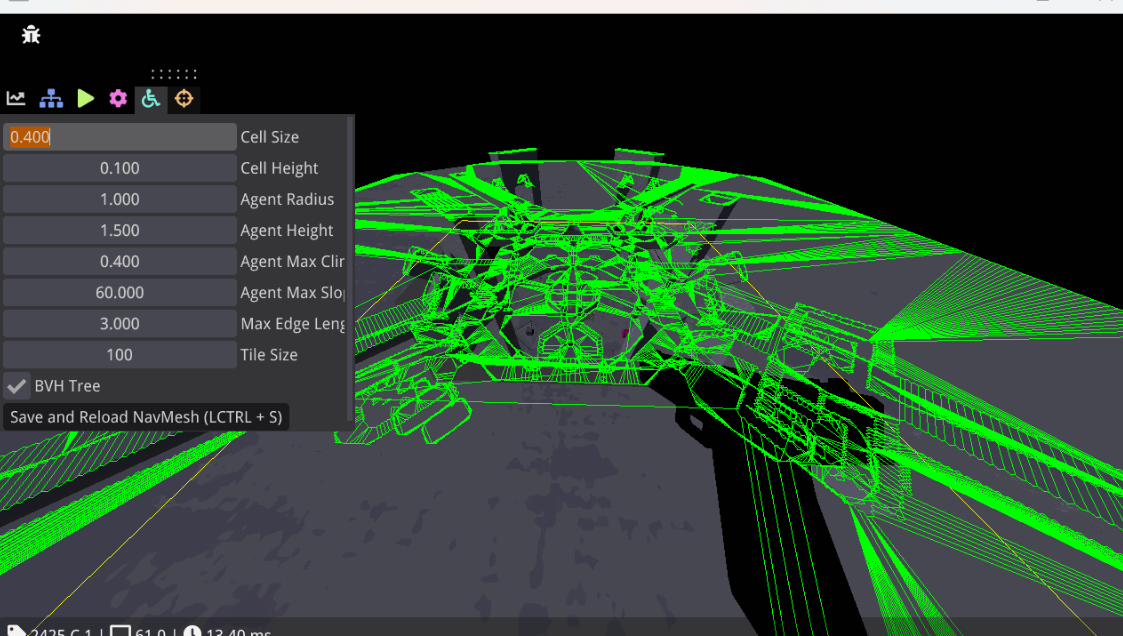
Recast is an open-source navigation library that generates a 3D navmesh from geometry and handles pathfinding. Integrating it into a custom engine with minimal documentation meant working largely from source and from a partial implementation a teammate had built in a previous project. The end result exposed a clean two-line setup to game-side code:
Setup is straightforward from a user perspective. A .gltf model is loaded and passed to the system, along with a choice between a SOLO_MESH for smaller maps and a TILE_MESH for larger ones:
1
2
3
auto model = bee::Engine.Resources().Load(
bee::FileIO::Directory::Assets, "HaloMap/Halo1Navmesh.gltf");
bee::Engine.ECS().CreateSystem(*model, SOLO_MESH, true);
Vertex Transform Fix
The first real issue was that Recast reads raw vertex data from .gltf files without applying node transforms, so any scale, rotation, or translation defined in the modelling tool was silently ignored. The fix was a preprocessing step that extracts each node’s transform and applies it to its vertices before the geometry is handed to Recast
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
void RecastDetourSystem::TransformVerticesToWorldSpace(
const tinygltf::Node& node, std::vector& vertices)
{
for (size_t i = 0; i < vertices.size(); i += 3)
{
glm::vec3 localVertex(vertices[i], vertices[i + 1], vertices[i + 2]);
glm::vec3 scaledVertex{1};
glm::vec3 rotatedVertex{0};
glm::vec3 worldVertex{0};
if (node.scale.size() == 3)
{
glm::vec3 scale(node.scale[0], node.scale[1], node.scale[2]);
scaledVertex = localVertex * scale;
}
else scaledVertex = localVertex;
if (node.rotation.size() == 4)
{
glm::quat rotation(
(float)node.rotation[3],
(float)node.rotation[0],
(float)node.rotation[1],
(float)node.rotation[2]);
rotatedVertex = rotation * scaledVertex;
}
else rotatedVertex = scaledVertex;
if (node.translation.size() == 3)
{
glm::vec3 translation(
node.translation[0], node.translation[1], node.translation[2]);
worldVertex = rotatedVertex + translation;
}
else worldVertex = rotatedVertex;
vertices[i] = worldVertex.x;
vertices[i + 1] = worldVertex.y;
vertices[i + 2] = worldVertex.z;
}
}
Known Limitations
One limitation I didn’t fully resolve was navmesh generation from .gltf files containing multiple disconnected mesh nodes. The system works correctly with a single mesh object. With disconnected geometry, additional nodes are either ignored or produce incorrect results. likely because the engine only reads collision from primitive index 0, though I wasn’t able to confirm whether the issue was on the engine side or within Recast itself. The practical workaround was requiring level meshes to be exported as a single object, which was a reasonable constraint given the project scope.
Agent Behaviour API
On top of navigation I built an API that game-side systems inherit to implement AI behaviour without re-implementing common functionality each time. The idea was that the engine provides generic building blocks, vision detection, path following, physics body setup, shooting. and each game composes them into whatever behaviour it needs. The API started intentionally engine-agnostic, but after feedback I shifted toward tighter integration with Bee’s own types. That was the right call for this engine, though the inconsistency between older and newer function signatures in the header reflects the refactor happening partway through rather than from the start.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
class AgentBehaviour : public bee::System, public bee::IEntityInspector
{
public:
AgentBehaviour() = default;
static void SetupPhysicsBody(JPH::CapsuleShapeSettings& capsuleSettings,
const entt::entity entity,
const glm::vec3& position,
const JPH::EMotionType& motionType,
const JPH::ObjectLayer& inObjectLayer);
static void AssignBodyId(entt::entity agent, JPH::BodyID body);
void AlignPhysicsBodyWithTransForm(const bee::Transform agentTransform,
const JPH::BodyID& body);
bool IsInSight(AgentAi& ai, const glm::vec3 agent_pos,
const entt::entity player, const float& distance);
bool IsInsideFrustum(bee::Transform& agentTransform,
const bee::Transform& playerTransForm,
const glm::vec2& frustumSize);
bool IsInRadius(const glm::vec3 agentPos, const glm::vec3 playerPos,
const float radius, const float height);
bool VisionDetection(AgentAi& ai, entt::entity player,
bee::Transform& agentTransform,
const bee::Transform& playerTransForm,
const glm::vec2& frustumSize);
void DrawRadius(const glm::vec3& agentPos, const float height,
const float radius, const bool);
void DrawFrustum(const glm::vec3& position, const glm::vec3& forward,
const glm::vec3& up, const glm::vec2 frustumSize,
const float frustumDistance, bool isInside);
bool ReturnToOrigin(DetourAgent& detour);
bool StopAndGo(AgentAi& ai, std::vector stopArray, int& index, float dt);
static void SetState(AgentAi& agent, const AgentAi::agentState state)
{ agent.state = state; }
void ShootRay(AgentAi& ai, const glm::vec3 agent_pos,
const entt::entity player);
void ShootProj(AgentAi& ai, const bee::Transform AgentTransform,
const glm::vec3 direction);
void DestroyAgent(entt::entity agent);
void Update(float dt) override = 0;
#ifdef BEE_INSPECTOR
void OnEntity(entt::entity entity) override;
#endif
};
The API started out as general as possible with the intention of being engine-agnostic, but after feedback I shifted toward integrating more Bee-specific types like transforms and Jolt bodies. The inconsistency between older and newer function signatures in the header reflects that shift happening partway through the project.
AI state is stored in an AgentAi component with settings grouped by category. Keeping vision, combat, and movement parameters in separate nested structs made the ImGui panel readable and kept the data organized for eventual serialization:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
struct AgentAi
{
struct VisionSettings
{
glm::vec2 normalFrustumBounds{60, 60};
glm::vec2 crouchFrustumBounds{75, 75};
glm::vec2 runFrustumBounds{90, 90};
float normalVisionRange = 15;
float crouchVisionRange = 20;
float runVisionRange = 30;
float normalDetectionRadius = 1;
float crouchDetectionRadius = 0.5f;
float runDetectionRadius = 2;
float detectionRadiusHeight = 2;
} vision_parameters;
struct AiSettings
{
float health = 100;
float damage = 15;
float reactionTime = 0.5f;
float investigationDuration = 3;
float stopFollowDelay = 1;
int rangedDistance = 4;
float recompute_delay = 0.3f;
float speed = 2.f;
float rotationSpeed = 4.0f;
float detectionRate = 3.0f;
float detectionMeter = 100.0f;
float decectionFalloffFactor = 5;
float alzheimers = 5;
float minStopTime = 4;
float maxStopTime = 8;
std::vector stopArray{0};
bool stopMoving = false;
} ai_settings;
struct agentProjSettings
{
glm::vec3 projectileScale{0.1f, 0.1f, 0.1f};
float projectileSpeed = 100;
float firingSpeed = 2;
float spread = 1;
float shootDistance = 6;
} projectile_settings;
enum agentState { idle, inCombat, investigating, returningToOrigin };
agentState state = agentState::idle;
// ... remaining fields
};
All settings are exposed through ImGui, giving designers control over vision ranges, detection speed, firing rate, and movement without touching code.
Zombies Demo
The zombies demo is a targeted test of the navigation and combat systems working under load. Agents spawn continuously, path to the player, and attack on contact. The intent was to verify navmesh traversal held up with multiple agents running simultaneously before moving on to more complex behaviour.
PayDay 2 Demo
The PayDay 2 demo is the more complex showcase, recreating the stealth detection mechanics of the PayDay 2 guards. I also set up and dressed the level to resemble the Framing Frame job from the game.
Vision and Detection
Agents use a combination of frustum and radius checks, combined with a line of sight raycast, to determine whether the player is visible. When visible, a detection meter fills at a rate that increases the closer the player is to the agent. When out of sight the meter drains after a short reaction delay.
State Machine
The agent runs a finite state machine with four states. Detection meter thresholds determine transitions between them:
Idle: The agent follows its preset path. If the player leaves vision the meter drains passively.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
case AgentAi::idle:
{
if (ai.currentDetectionAmount > 0 && !visible)
{
ai.recompute_timer += dt;
if (ai.recompute_timer >= ai.ai_settings.reactionTime)
ai.currentDetectionAmount -= ai.ai_settings.reductionRate * dt;
}
else ai.recompute_timer = 0;
agentTransform.SetRotation(detour.GetRotation());
detour.FollowPath(ai, ai.path, dt);
break;
}
Investigating: Triggered when the meter passes 50%. The agent moves to the player’s last known position and lingers there before returning to its path. During this phase the agent briefly continues tracking the player to make it harder to simply hide behind cover.
1
2
3
4
5
6
7
8
9
10
11
12
13
case AgentAi::investigating:
{
if (ai.currentDetectionAmount > 0 && !visible)
{
ai.recompute_timer += dt;
if (ai.recompute_timer >= ai.ai_settings.reactionTime)
ai.currentDetectionAmount -= ai.ai_settings.reductionRate * dt;
}
else ai.recompute_timer = 0;
Investigate(ai, detour, agentTransform, visible, dt);
break;
}
In combat: Triggered when the meter is full. The agent does not revert to earlier states and stays aggressive until eliminated. It moves toward the player but holds a set distance to shoot from, firing projectiles at a configurable rate.
1
2
3
4
5
6
7
8
9
10
11
12
13
case AgentAi::inCombat:
{
UpdatePath(ai, detour, playerTransform, isAgro, dt);
glm::vec3 direction = glm::normalize(
playerTransform.GetTranslation() + ai.playerOffset
- agentTransform.GetTranslation());
PayDayCombat(ai, agentTransform, playerTransform, direction, isAgro, dt);
SetRotation(ai, agentTransform, direction, dt);
detour.FollowPath(ai, dt, ai.ai_settings.rangedDistance);
break;
}
Reflection
The behaviour tree feedback I received after the sprint 3 presentation was something I found genuinely interesting in hindsight. A generic node-based behaviour tree system in the engine would have been a cleaner fit for the kind of composable AI the API was trying to support. The time constraint meant I could not act on it during the project, but it is something I intend to implement independently.
The API design also shifted partway through from being engine-agnostic to being more tightly integrated with the engine architecture. In retrospect starting with that integration in mind would have made the earlier code more consistent and saved some refactoring time.